Trying FuseSoc
I recently decided to try out FuseSoC in one of my FPGA work projects to see how easy the migration would be. The following are my impressions of using the tool, without going into detail about FuseSoC and Edalize; my suggestion would be that you check the documentation and then read this post to get to know a practical example.
My project targets a 10x ADC digitizer board which includes a Kintex Untrascale for data processing, the SIS8300Ku. The board also includes 2x DACs, exernal clock and trigger interfaces, 2Gb of DDR4 memory, among other interfaces. Different applications (data processing logic) is available for specific experiments and setups, while the board logic remains the same, i.e. the code that allows configuration and monitorization of the hardware features. A project, in this context, is the combination of a particular application module and the common board module, a fairly common scenario.
All applications must have the timingInfo module; it decodes timing related information and includes generics to generate or exclude logic (again, depends on the application).
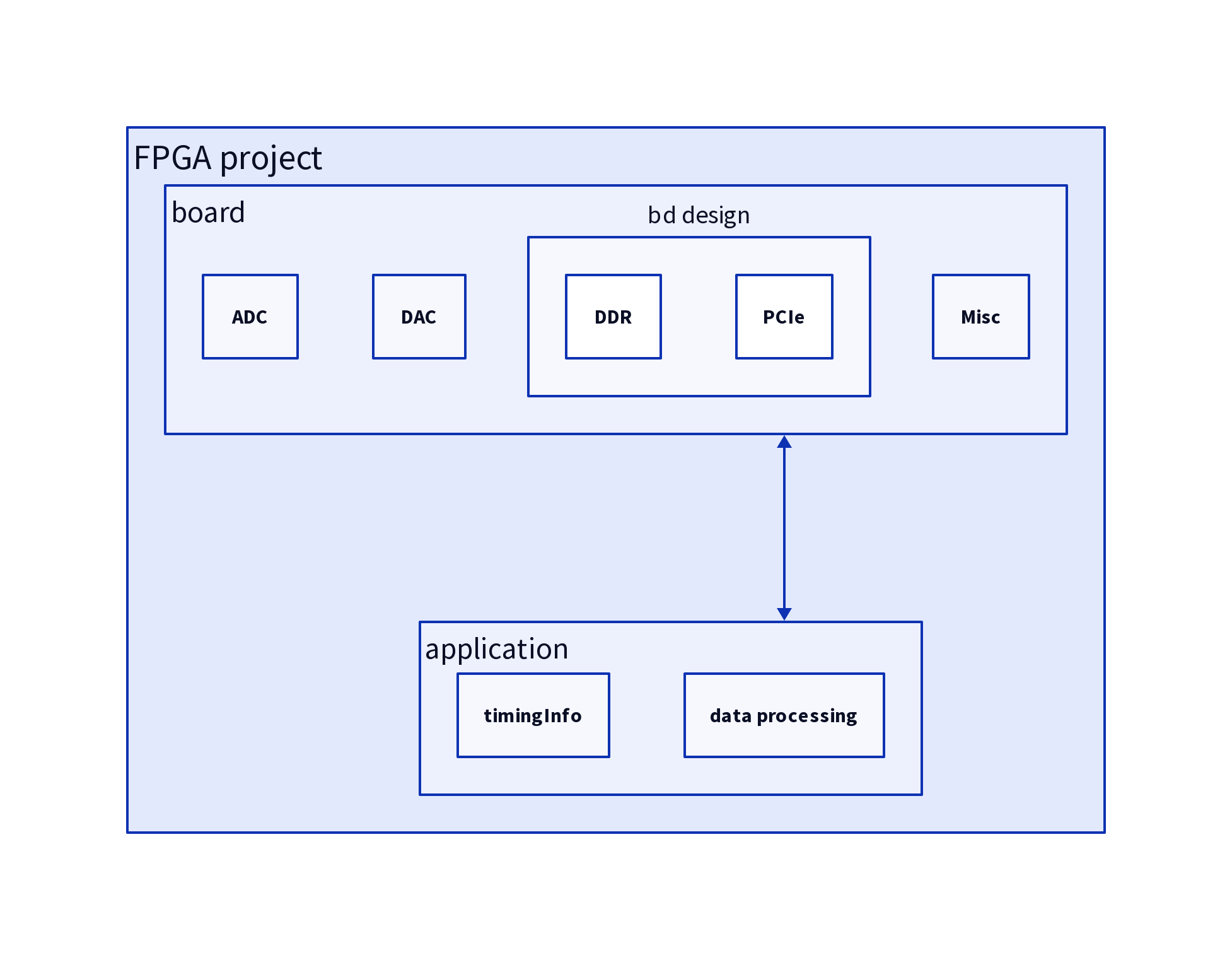
With this scenario in mind, I wanted to update my project in the following manner:
- declare the
timingInfoas a remote core. Currently, the module is included as a git submodule - have a core file to synthesize the
board module, separated from the final project, to generate a Design Checkpoint file. This file should then be included in all projects, saving compilation time - have a single core file for all applications; each target will be a FPGA project, i.e the
board logic, the files for a specificapplication logicand thetimingInfoconfigure with the propergenericsvalues for that application
Remote core
After creating a fusesoc.conf file in the root folder of my project, adding the timingInfo module as a remote core was straightforward:
fusesoc library add timingInfo gitLinkToModule
The proper lines will be added to the fusesoc.conf file; since I needed to add a .core file to the project, I created a new branch, test/fusesoc. To make sure that the tool downloads the right branch, the property sync-version needed to be added to the fusesoc.conf together with the branch name (could have been the sha value as well).
[library.timingInfo]
location = fusesoc_libraries/timingInfo
sync-uri = gitLinkToModule
sync-type = git
sync-version = test/fusesoc
The timingInfo.core YAML file is shown below. For now the only target is the default, since this is the one that is used when referencing the core within another top core. This means that all files in the rtl set and the defined generics will be available in the top’s core target that uses timingInfo as a dependency.
CAPI=2:
name: euxfel:common:timingInfo:1.8.2
description: TimingInfo module
filesets:
rtl:
files:
- files1.vhd
- src/file2.vhd
- ...
file_type: vhdlSource-2008
targets:
default: &default
filesets:
- rtl
parameters:
- generic1=true
- generic2=3
- ...
parameters:
generic1:
datatype : bool
description : Enable feature 1
paramtype : generic
generic2:
datatype : int
description : Size of output 2
paramtype : generic
...
From this simple core, a couple of first impressions:
- each source must be specifically mention, there is no use of regular expressions. This can be seen as quite annoying or a fail-safe: only the required sources are added to the proper list.
- the sync-version property is not mention in the documentation, I happen to find another FuseSoC project that used it. Running the command fusesoc library add –help would also show that the option.
- the property name follows the VLNV convention, introducing yet another version number. In our case, git’s sha would be enough, and the module itself includes a hardware coded version, so we now have three version numbers to maintain. The information is optional, however when taking into account that only the default target is read when sourcing a core file, the role of FuseSoC’s version could be used in these example scenarios:
- entities with multiple architectures (and sources associated with the latter)
- different sources depending on specific FPGA platforms (this could also be covered using flags)
- manage exposed generics to the top module
Generating the board checkpoint file
Since my .conf file is saved in the root directory of the project, I need to update it so that it also searches for core files in that directory. This is easily done running
fusesoc library add --sync-type local sis8300ku .
The .conf file will then be updated to include the following lines:
[library.sis8300ku]
location = /full/path/to/project
sync-uri = .
sync-type = local
auto-sync = true
I grouped the different type of files of the board into filesets in board.core file.
CAPI=2:
name: euxfel:sis8300ku:board:0.20.14
description: SIS8300 KU board logic
filesets:
rtl:
files:
- sources/hdl/file1.vhd
- sources/hdl/file2.vhd:
file_type: vhdlSource
...
file_type: vhdlSource-2008
configProj:
files:
- scripts/vivadoProject.tcl
- sources/bd/pcie_ddr.tcl
- scripts/bdWrapper.tcl
file_type: tclSource
genBoardCheckpoint:
files:
- scripts/genCheckpoint.tcl:
file_type: user
- scripts/genCheckpointCall.tcl
file_type: tclSource
boardCheckpoint:
files:
- sources/dcp/board.dcp:
file_type: user
- scripts/addDcp.tcl:
file_type: tclSource
A couple of new concepts are show:
- all rtl files are define as
vhdl-08sources exceptfile2.vhd, but there is no need to create a separate fileset. - the
vivadoProject.tclscript configures the vivado tool to my project. Some of these options include VHDL as the target language and use a specific folder as the source of user IPs. Specifying it as atclScriptfile makes sure that vivado will source it when creating the project. - a
userfile type should not be imported by the tool (in my case vivado) but must be included in the build directory that FuseSOC will create. You can use the –no-export flag in FuseSoC so that sources are not copied into the build directory - this is my prefer case, as to avoid situations where I start fixing the copy. - since the checkpoint point is not a default artifact of Edalize’s build, the
genBoardCheckpointfileset includes thegenCheckpointCall.tclsource that will call the user filegenCheckpoint.tcl. The latter must be added in case another FuseSoC user does not use the –no-export flag. The tcl commands to generate the checkpoint file are:
set scriptLocation [file normalize [info script]]
set_property STEPS.SYNTH_DESIGN.TCL.POST “[file dirname $scriptLocation]/genCheckpoint.tcl” [get_runs synth_1]
- finally, the
boardCheckpointincludes the generated dcp file and a script to read it in a vivado project since FuseSoC does not recognize .dcp files. This fileset will be my default target, i.e., these should be the only files imported on my final FPGA project.
The rest of the YAML file is as follows:
targets:
default: &default
filesets:
- boardCheckpoint
hooks:
post_build: [saveMaps]
fastAdcBoard:
filesets:
- configProj
- rtl
- bd
- genBoardCheckpoint
toplevel: ent_board
description: Generate dcp file for SIS8300ku board
default_tool: vivado
tools:
vivado:
part: xcku040-ffva1156-1-c
pnr: none
source_mgmt_mode: All
# EDA flow API does not yet support pnr
# flow: vivado
# flow_options:
# part: xcku040-ffva1156-1-c
# pnr: none
# source_mgmt_mode: All
#Save artifacts
hooks:
post_build: [saveMaps]
scripts:
saveMaps:
cmd: ['cp','*.maps','../../../dist/maps/']
The fastAdcBoard target generates the desired checkpoint file; with pnr: none, Edalize will stop the build right after the synthesis. This option is not yet supported in the new Edalize flow API, hence I am using the legacy tool API. There are also custom maps files generated by an internal board module which should be saved; a hook is defined that should run after build is completed.
Running FuseSOC with the –setup flag will create the build folder, tcl scripts and Makefile file used later by the vivado tool to create, compile and run the project. This is very convenient for debugging, experiment (change tcl scripts created, create new Makefile targets, etc.) or just create the project to then continue in vivado. It also made it clear that the post_build hook defined in my core file would never run, since Edalize’s build always assumes that a bit file is generated.
Edalize supports a great number of tools, however the list of options per tool is quite niche. I was surprised that simple parameters, like the target language in vivado, is not readily available. This is to say, be prepared to write some simple scripts for your tool when migrating to FuseSoC.
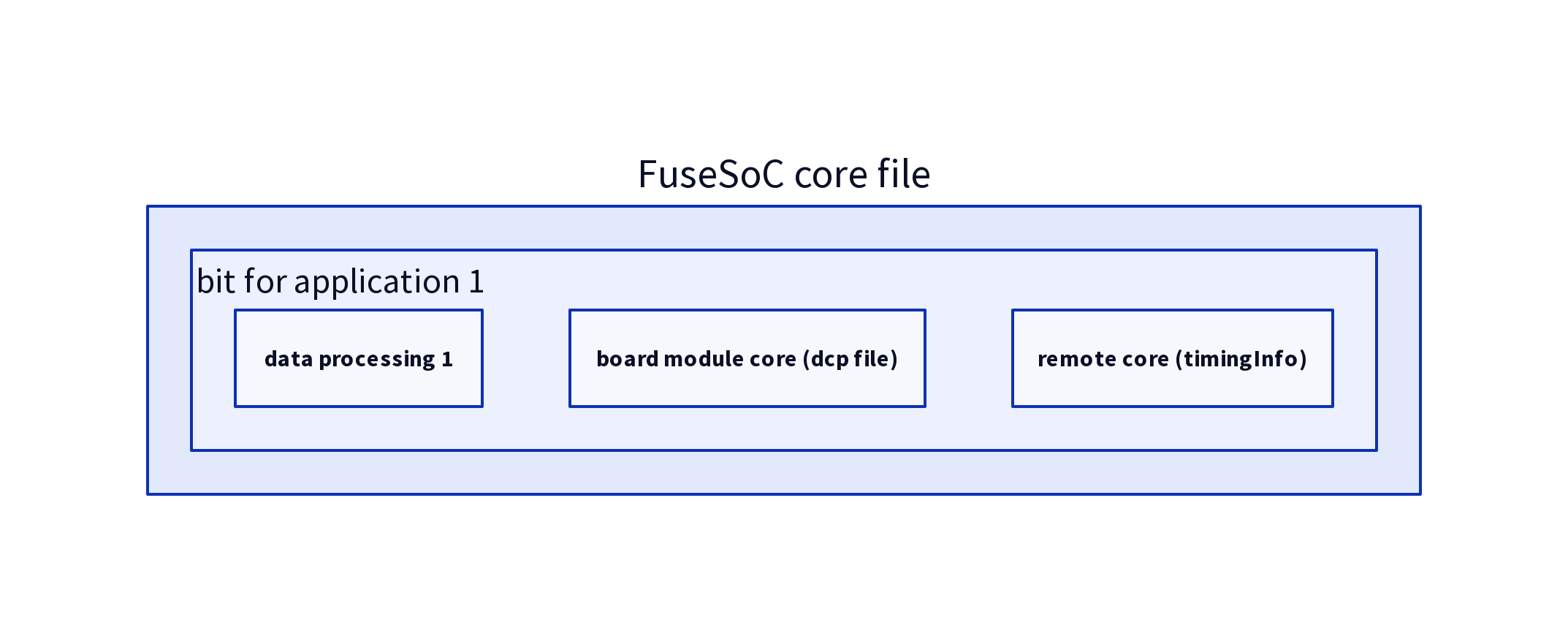
The project core file
The last core file, applications.core, uses the previous two as dependencies, and each target defines a bit file that integrates a different application, i.e. a collection of source files for specific data processing.
CAPI=2:
name: euxfel:sis8300ku:applications:0.9.1
description: SIS8300 KU applications
filesets:
topDesign:
files:
- sources/hdl/TOP_SIS8300_KU.vhd
- sources/hdl/PKG_UTILS.vhd
- sources/constraints/board_pins.xdc:
file_type: xdc
- sources/constraints/board_fpga_constrains.xdc:
file_type: xdc
- scripts/vhdlProject.tcl:
file_type: tclSource
# Do not use xdc files during synthesis
- scripts/constraints.tcl:
file_type: tclSource
file_type: vhdlSource-2008
depend:
- euxfel:sis8300ku:board:0.20.14
- ">=euxfel:common:timingInfo:1.8"
The depend parameter is where I reference the other two core files; this will import all sources, the generics and any defined hooks from both default targets of the timingInfo and board to this fileset. Just as an example, I specify that the board core must have a specific version, while the timingInfo must be above or equal to 1.8.
app1:
files:
- sources/hdl/application_1/file1.vhd
- ...
- sources/ip/application_1/clk_wiz_dac.xci:
copyto: ip/clk_wiz_dac/clk_wiz_dac.xci
file_type: xci
- sources/ip/application_1/c_shift_ram_0.xci:
copyto: ip/clk_wiz_dac/clk_wiz_dac.xci
file_type: xci
file_type: vhdlSource-2008
This is an example of an application fileset which introduces the copyto parameter. In my project folder, all application specific IPs are under a single folder, however vivado requires that each xci must be in a separate folder when these sources are read (not added/imported) into a project. The copyto takes care of this, specifying the path (inside the build’s folder) where the file should be, creating any required subfolder.
targets:
# The "default" target is the top module
default: &default
filesets:
- topDesign
toplevel: ent_sis8300_ku
flow: vivado
flow_options:
part: xcku040-ffva1156-1-c
source_mgmt_mode: All
parameters:
# Default values for timing
- generic1=false
- generic2=1
app1:
<<: *default
filesets_append:
- app1
description: Application 1
app2:
<<: *default
filesets_append:
- app2
description: Application 2
parameters:
- generic1=true
- generic2=2
The app targets are very simple and straightforward. If necessary, I could override any of the parameters values of the imported default target, as it is done in app2 for the timingInfo module. If I were to target a different tool, FuseSOC’s makes it very easy to include extra flags in the flow/flow_definitions default target definition or via command line when calling the tool.
Custom maps are also generated from the apps; the hook included in the fastAdcBoard default target will take care of copying it to the proper folder.
There is no dependency between targets, so the final project Makefile looks like this:
#Get core name
define core_name
$(shell sed -n -e 's/^name: \(.*\)/\1/p' $(1))
endef
#Replace in core name : with _
define core_name_folder
$(subst :,_,$(1))
endef
FUSESOC := python/environment/fusesoc/bin/fusesoc
BOARD_VLNV := $(call core_name, board.core)
BOARD_NAME := $(call core_name_folder, $(BOARD_VLNV))
APPS_VLNV := $(call core_name, applications.core)
APPS_NAME := $(call core_name_folder, $(FASTADC_VLNV))
DIST_FOLDER := dist
.PHONY: clean
clean:
@echo "Deleting contents of the build directory"
@rm -rf $(BUILD)
# Generate board checkpoint
fastAdcBoard:
$(FUSESOC) run --clean --build --no-export --target $@ $(BOARD_VLNV)
# FuseSOC does not run post_build hooks if target does not generate a bit file
cp build/${BOARD_NAME}/$@/*.maps ${DIST_FOLDER}/maps
app1: fastAdcBoard
$(FUSESOC) run --clean --build --no-export --target $@ $(APPS_VLNV)
#TODO add hook in default target to copy bit file
cp build/${APPS_NAME}/$@/*.bit ${DIST_FOLDER}/firmware/
Final remarks
There are ton of features from FuseSOC’s that were out of my project scope (filters, generators, virtual cores and mappring). Nevertheless, the overall experience is a very positive one. The YAML file really makes the flow clear and very readable, while taking advantage of the format to easily reconfigure/create new projects. The documentation is enough to get simple projects up and running, but many things become more clear by digging into the source files in the git repository.